清华系激光雷达公司,成了量产元年最大的黑马
贾浩楠 发自 凹非寺量子位 | 公众号 QbitAI
激光雷达竞速,正在走上造车新势力的老路——
交付决定生死,量产决定胜负。
或许你已经见微知著,已经交付的新车、正在上市的新车,以及即将面世的新车,智能都在成为新的差异化卖点和竞争力,而激光雷达,正在成为标配传感器——区别只是数量上的不同而已。

激光雷达元年,激光雷达上车元年,越来越多的人这样说。
但在更为垂直的领域内,围绕上车和量产,激光雷达的江湖格局次序,也在悄然形成。
有巨头企业为代表的擂台,也有创业势力为核心的梯队,而且更为激烈的创业玩家中,造车新势力的进程再次被上演:
造车有蔚小理,激光雷达也有禾速探。
禾指的是禾赛,速指的是速腾聚创,这两家独角兽早期突破的乘用车客户分别是高端商务车品牌高合和本土化超跑品牌路特斯;探代表的是探维科技,一家源自清华的创业黑马,今年以合创汽车的车型定点一鸣惊人,而且相比禾赛速腾优先瞄准的“豪华旗舰车”市场,探维攻下的订单是市场份额潜力更广阔的“大众”领域,于是更加令人侧目。

只是这种初具雏形的创业格局背后,依然有诸多未解谜题:激光雷达上车究竟拼什么?创业三强又靠什么?“黑马”探维为啥会一鸣惊人?
以及激光雷达第一阶段的洗牌点,到了吗?
元年里的三强格局和头号黑马
激光雷达这几年被大众越来越了解,还得多亏马斯克数年如一日的diss。
这也是目前量产自动驾驶进程中,两大旗帜鲜明、互不相让的传感器路线。采用激光雷达的是自动驾驶融合感知路线,蔚小理都是代表;采用摄像头为核心的纯视觉路线,特斯拉为引领者。
马斯克认为,自动驾驶本质是训练一个和人类相同的AI司机,既然人能仅用视觉驾驶,那么AI也一定可以。摄像头之外的传感器方案,都是累赘。
但纯视觉方案现在的问题在于,摄像头采集到的图像数据的确包含足够的信息,算法的识别准确率却做不到万无一失。原因也很简单,真实道路情况太过复杂,无数的异型车、异形物,各种意想不到的corner case,没有任何一个自动驾驶数据库能全覆盖。

所以,激光雷达的出现,是为了弥补单一数据源的自动驾驶系统的失效风险。
激光雷达的原理不难理解:发射探测光线(一般为905nm或1550nm波长),遇到障碍物一定会产生回波,这其中自然包含了物体的形状、大小等特征。然后配合融合感知算法,就能结合激光雷达点云图,和图像数据计算出一个目标准确的尺寸、速度、运动方向等等信息。
至少在感知层面给摄像头“看不到”的风险增加一层冗余。
于是在“纯视觉还不是万能的”前提下,激光雷达作为冗余的融合感知路线,就成为了更多玩家的选择,也是更快实现自动驾驶量产上车的现实路径。
并且在2022年,之前激光雷达的定点、SOP和量产合作的推进,终于来到了历史性时刻。小鹏P5来了,蔚来ET7来了,理想L9来了……开始交付、已经发布、即将上市的旗舰车型,无一不是激光雷达车型,车均至少一个激光雷达。

激光雷达元年!真正的激光雷达量产上车的元年!
激光雷达赛道和造车一样,量产决定胜负。
归纳今年已经或马上量产上车的激光雷达车型,以及他们背后的供应商,会发现国内主要玩家中,有两家巨头:大疆和华为。
本土创业公司中,只有3个名字出现:速腾聚创、禾赛科技,和探维科技。
乘用车方面,探维拿下合创汽车定点,未来将在合创汽车多个新车型上量产。
商用车方面,探维和自动驾驶卡车赛道的头部公司主线科技达成合作,将在多种自动驾驶卡车上推动激光雷达方案量产。
公开信息中,探维科技商业化进展的意义被官方很“低调”隐藏,但从车载激光雷达江湖全景上看:
探维科技,成为第3家拿下车企定点的本土创业公司。
所谓定点是指被汽车厂商指定为零部件的批量配套供应商,具体的量产项目商谈紧随其后。
根据企查查年初发布的数据,国内激光雷达相关公司数量已经超过2800多家。
其中已经有专利、有产品的公司,只有70多家。
而拿到了车载激光雷达的量产入场券的创业公司,只有探维、速腾、禾赛。
所以如今激光雷达江湖正在悄然形成量产上车基础上的创业格局:三强格局。
探维科技本身,则是这3强中的让人意想不到的“黑马”。
速腾、禾赛的名字时常见诸报端,都创办于2014年,经历近10年研发开启量产上车。
2018年,探维科技才正式创办。与禾赛师出同门,都是清华精密仪器系的代表。
但在禾赛、速腾已经找准车载激光雷达方向的时候,探维科技的核心创始团队,还以研究生身份在清华精密仪器系的实验室里,承担星载雷达科研项目。
清华的积累和技术,也深刻影响着探维今天的产品和路线。
所以,探维科技自身实力和背景在行业内是毋庸置疑的。
行业将探维称为“黑马”,正是因为这个一直保持低调“后发者”,仅用行业普遍周期一半左右的时间,就先于其它选手迈过车载激光雷达的量产门槛。
三强格局中的“黑马”,从大众舆论认知来看,意料之外。但如果从技术视角出发,又完全在情理之中。
什么样的激光雷达才能上车
上万家公司涌入激光雷达赛道,有产品有专利的也有近百个。
但到底什么样的激光雷达,才会被车企青睐?
车载激光雷达,大概分为机械式、半固态、纯固态三个形式。
不同的技术阵营对应了不同的业务产品路线。
从产品形态上看,机械式激光雷达一般都供给Robotaxi项目,或自动驾驶量产的前期研发,本身很难通过车规验证。
而半固态或固态激光雷达,则是奔着通过车规验证,量产上车的最终目标去的。
这样就能把所有激光雷达玩家分成两个路线。
一种路线,是从专用激光雷达(测绘、安防)起家,然后转向Robotaxi,再逐渐进入乘用车量产领域的玩家。
比如禾赛科技、速腾聚创、Velodyne等。
另一类玩家,成立之初做激光雷达就是为了乘用车,产品的形态、设计、技术路线都以实现规模量产为原则。
探维科技、大疆Livox、华为等等都是这样的。
技术发展上,激光雷达逐渐取消转动机构,“固态化”程度越来越高是一个行业公认的趋势。
只不过如何实现固态化、在如今半固态过渡阶段采用什么样的方案,各家多有不同。
比如,速腾、华为则采用的MEMS微振镜式,激光发生器本身固定不动,通过控制微小的镜面平动和扭转往复运动,将激光管反射到不同的角度完成扫描。
大疆则选择双楔形棱镜方案,激光先后通过两个棱镜发生两次偏转,控制两面棱镜的相对转速便可以控制激光束的扫描形态。
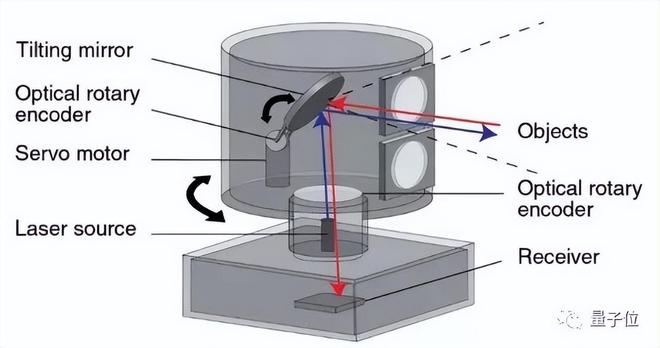
探维科技和目前全球市占率最高的法雷奥都有推出转镜式方案,反射镜面围绕圆心不断旋转,从而实现激光的扫描。
从目前展现的趋势来看,车载激光雷达并没有走出大一统的技术路线,也就是说,各个玩家都有跑到终点的可能。
但为什么会有进展快慢的差异化?
不久前,车载激光雷达的开创者Ibeo申请破产,倒在量产第一步。
Ibeo 1998年成立,一开始就瞄准车载激光雷达,开创了这个品类。
日后无数自动驾驶传说级大佬和故事,包括Waymo之父Sebastian Thrun制霸DARPA挑战赛、奥迪的第一款L3量产车等等,背后都和Ibeo激光雷达密不可分。

行业鼻祖破产,创始人说了这样的话:
激光雷达上车要经历功能定义、系统设计、软件开发、测试验证和系统集成等步骤,其间对每个环节的诸多细节的打磨,需要时间积累。遗憾的是,现在没有找到一套直接可用的激光雷达上车办法和公式。
结合国内激光雷达的内卷趋势,其实能看出来,激光雷达的上车量产不仅是熟知车规方案、有量产产线这么简单,背后考验的是技术、制造、成本管理、产业链、用户服务等等方面的综合实力。

比如激光雷达和整个ADAS系统,以及车辆设计层面软硬件耦合,需要与自动驾驶团队、车厂之间形成紧密配合,深度参与设计。
这种产业链层面的深层共振,也是智能车厂商与激光雷达供应商越来越深度绑定的核心原因。
能顺利量产交付的激光雷达公司,技术路线可能不尽相同,但背后的普遍法则,都是如此。
与其基于现象分析,不如直接找到“黑马”问问。于是探维创始人及CEO王世玮,亲自回应了黑马之谜。
揭秘黑马背后之谜
对于激光雷达的量产上车,局外人认为最大阻碍是成本。行业先驱认为最大的挑战在于软硬耦合以及和客户的深度合作。
这些观点,探维科技CEO王世玮都很赞同。
但在这些易于观察到的表象之外,他还分享了探维为何能脱颖而出的一些要点和思考。
比如说在和车企接触过程中,探维发现尽管成本是一个很敏感的因素,但车企对于激光雷达的最大要求,是安全可靠。
这也决定了探维科技产品的一个基本路线:
ALS平台。

ALS平台的目的,是为了在车载激光雷达稳定——成本——性能三个底层需求之间寻到最佳平衡。
ALS平台下的包括很多不同的技术方案:自主TOF芯片、单轴扫描、高效组装量产(调光流程)等等。
比如,同样在混合固态的体制下,探维科技选择单轴扫描的方案,结构更简单可靠性更高,更加适应车规要求,而且整个激光雷达的高度尺寸也减少近一半。
对于上车量产来说,单轴扫描方案兼顾的是稳定和性能要求。
自主TOF(飞行时间测距法)芯片,则直接来自探维团队在清华精仪系的科研成果。TOF芯片本身是一个信号处理单元,用来计算目标回波的距离信息。
在激光雷达中将TOF芯片自主化,意味着探维在产品成本、稳定性、供应链可靠性几个维度上都取得优势。
同时,为了降低整个系统复杂程度、提升大规模量产时的生产效率,以及整个器件硬件成本,探维科技在激光雷达正面收发单元中采用线光斑+阵列器的组合方案。

先把阵列化发射器调试为线光斑,再用线光斑和接收端阵列器做匹配,这样一套方式,把以往激光雷达量产最复杂的调光程序大大简化。
当然,这样的技术方案,也是来自星载雷达“太空”技术的降维。
王世玮认为,无论是成本也好,还是与软硬件耦合也好,都是目标和现象,实现它们的途径和方法,依然是技术积累。
为了契合车规要求,探维科技选择了更稳定的单轴振镜方案,同时在可靠性和外观尺寸两个方面切入。
成本层面,探维则把早年星载雷达项目的部分技术沿用在车规产品上,提高生产效率的同时,大大降低了成本。
面对自动驾驶发展趋势,以及车载激光雷达今后如何进化,探维科技也提出了一个全新的探索:
融合传感器,或者叫它激光雷达3.0。
在常规激光雷达传感器的基础上,硬件层面融合进COMS传感器,通过FPGA同步触发,直接在硬件端实现不同类型数据的融合。

也就是把一部分摄像头,直接集成进激光雷达设备中。
探维分析这背后的趋势,是数据前融合在目前自动驾驶发展中逐渐成为主流,而用算法在计算平台上进行前融合,自动驾驶团队的开发成本高,后期还要占用额外计算资源。
探维希望在硬件端做到不同数据的前融合,直接输出可供ADAS系统使用的数据。
未来激光雷达一定会向探维提出的融合传感器方向发展吗?
不好说,但探维的Fusion融合方案和现在量产的方案,都是深刻分析了车企用户的要求后做出的选择。
所以,“黑马”探维科技其实早已在默默积累中,写下了一鸣惊人的注脚。
每一步都以低成本、车规级、易量产为原则,才有了探维“黑马”表现。
车载激光雷达分水岭
车载激光雷达,现在形成的格局是巨头2子+创业3强。
巨头2子:华为、大疆,都是家大业大,都以Tier 1切入智能车产业链,虽然一时一地进展有快慢,但实力和潜力仍然不可小觑。
国内创业3强:禾、速、探。
而评判的标准很简单:上车交付,量产商业化。
上车有交付,决定了核心价值是否得到认可,是生死临界点。

量产商业化,则代表了竞速中的快与慢,是左右全局的胜负手。
有意思的是,如此标准下,其实激光雷达江湖还只是呈现了第一阶段竞速格局。所谓巨头,只大在体量,商业进展并不一定比创业公司快。创业公司中,先行者也不一定能率先实现量产,后来者并非毫无机会,马太效益还没完全展开。
所以问题也就随之而来,车载激光雷达竞争的核心到底是什么?
表面上看是不同的技术路线、“固态化”程度、分辨率、拿下的定点数量等等。
但本质上是对自动驾驶的理解,对车厂需求的洞察,以及有没有与之匹配的工程制造能力。
说白了,技术好还不够,服务和交付都得跟得上。
是不是再次与造车玩家的核心能力对应上了?