受蜜蜂启发!现实版大黄蜂机器人,登上Nature封面!
在自然界中,有许多的群居昆虫是优秀的自然建筑家,黄蜂作为一个典型的例子,能够空中协作进行高效筑巢,相信看过电影《变形金刚》的读者们都对影片中的大黄蜂等机器人印象深刻,他们也能完成高效自主运动及团队协作。在现实生活中,为了提高生产率和安全性,目前基于仿生机器人的建筑活动技术也逐步被开发用于建筑构件的组装和连续添加制造。
受黄蜂筑巢的启发,来自英国帝国理工学院的Mirko Kovac团队通过将3D打印机安装到无人机上,设计构建了一批能够在空中进行有序协作、完成连续建造任务的机器人队伍(Airial-AM),半小时盖2米太厉害了!。这不禁让笔者感叹,未来有可能实现全机器建筑房屋,以及修复受损建筑。该团队的这一创新工作近日以封面论文形式发表在《 Nature》期刊,并被 Nature Video进行亮点报道第一作者为Zhang Ketao。

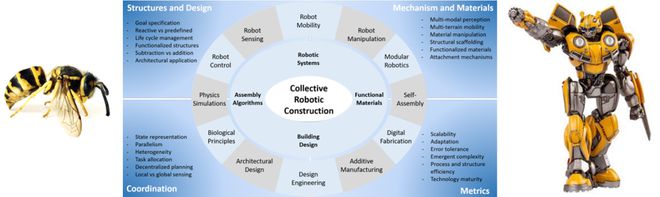
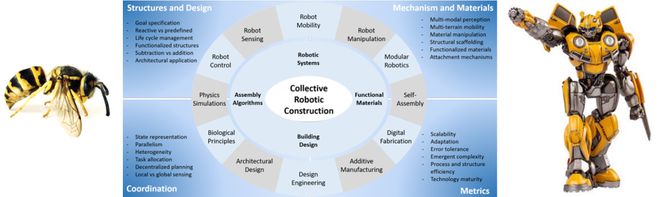
这项研究构建的Airial-AM将3D打印和路径规划框架进行整合,可以在建造过程中适应建筑几何形状的变化调整工作形式。整个Airial-AM队伍主要包括两种个体:BuilDrones和ScanDrones,其中,BuilDrone主要是为了实现物理材料的自动沉积,其制造精度取决于环境;而ScanDrone则是用于在每层材料沉积后进行增量空中扫描和验证观察。该群落在空中飞行时完全自主,但可以按照指定策略回路进行空中协同作业,并做出实时轨迹调整,这个过程也受控制器监控,可在特殊情况下进行干预。研究结果证实,这些无人机队伍可以在实验室中自主但协同的进行空中作业来建造和修复建筑物。
Aerial AM建造高的圆柱形几何建筑
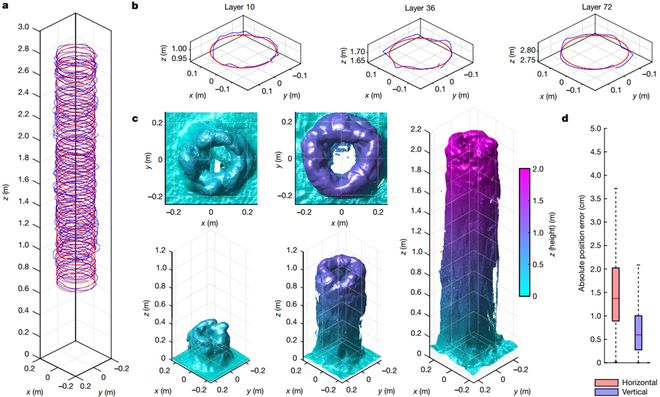
Aerial AM建造圆柱形几何建筑的轨迹路径和追踪评估
在进行结构建筑时,层宽和打印精度之间的比率是研究者在打印几何设计和路径生成中考虑的主要因素,因此研究者设计了三种可缩放的路径来构建几何建筑:多个相邻的同心圆构筑实心墙;一条圆形的皮亚诺曲线,交替层围绕圆圈交错排列,偏移量为半个单位;三个不相邻同心圆与圆形皮亚诺曲线交替的混合设计。在进行空中实际作业的过程中,控制基础材料流变性和固化性质对于Airial-AM打印挤出非常重要,研究者使用了两种典型材料:一种是低密度聚氨酯泡沫塑料(干燥时可膨胀25倍);另一种是更坚固、更精确,是由水泥制成的混合物,半小时分别建造得到了高2.05米的72层圆柱体和高0.18 m的28层圆柱体。
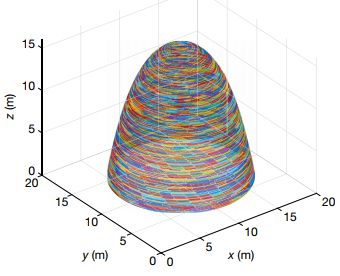
Aerial AM队伍光轨迹虚拟打印圆顶状旋转表面
比较有意思的是,当Airial-AM与几何体发生碰撞时,可以展现出适应行为并对构筑回路做出及时的调整,表现出了强大的灵活性和应用潜力。为了提高建造几何体的细节分辨率,研究者通过集成一个灵巧的Delta操纵器设计了另一种Aerial AM BuildDrone,并将材料喷嘴与操纵器末端执行器一起移动来提高打印精度。建造过程中,BuilDrones和ScanDrones分工明确,交替有序的逐层进行打印和调整。Aerial AM对所构筑几何的形状进行不断实时评估及调整的特点,也保障了建造过程的精度和规范性,最终建造精度是5 mm。
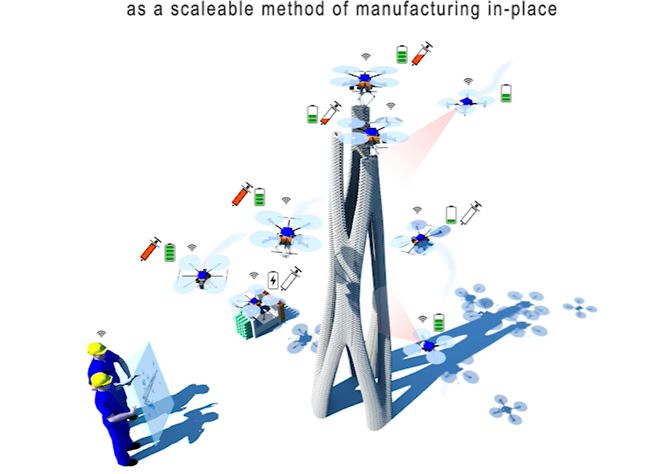
Aerial AM——“一种可大规模应用的结构建造方法”
总而言之,在这项研究中,研究者们开发了一种全新的自主、灵活、可团队协作的无人机机器人群,为在偏远地区和自然条件极为恶劣的地区进行住房和重要基础设施的建设提供了潜在手段,这将大幅降低该类建造过程的成本和风险。研究者们提到,接下来将尝试走出实验室的作业范围,引入差分全球定位系统(GPS)实现多传感器同步定位和制图(SLAM)系统提供足够的室外定位,从而探索更广阔的的实际用途。让我们都拭目以待吧!
参考资料:Zhang K. Chermprayong P. Xiao F. et al. Aerial additive manufacturing with multiple autonomous robots. Nature609 709–717 (2022). https://doi.org/10.1038/s41586-022-04988-4.
来源: 高分子科学前沿声明: 仅代表作者个人观点,作者水平有限,如有不科学之处,请在下方留言指正!